Hexapod – The Toddler Years
Ausgangssituation
Letztes Jahr hat der Hexapod mittels Reinforcement Learning bereits das Aufstehen gelernt. Dieses Jahr war unser Ziel, dass der Hexapod gehen lernt. Den bestehenden Prototypen haben wir von der vorherigen Projektgruppe übernommen. Für das Gehen lernen mussten wir einige Teile des Systems überarbeiten oder erst fertig stellen.
Smart Legs
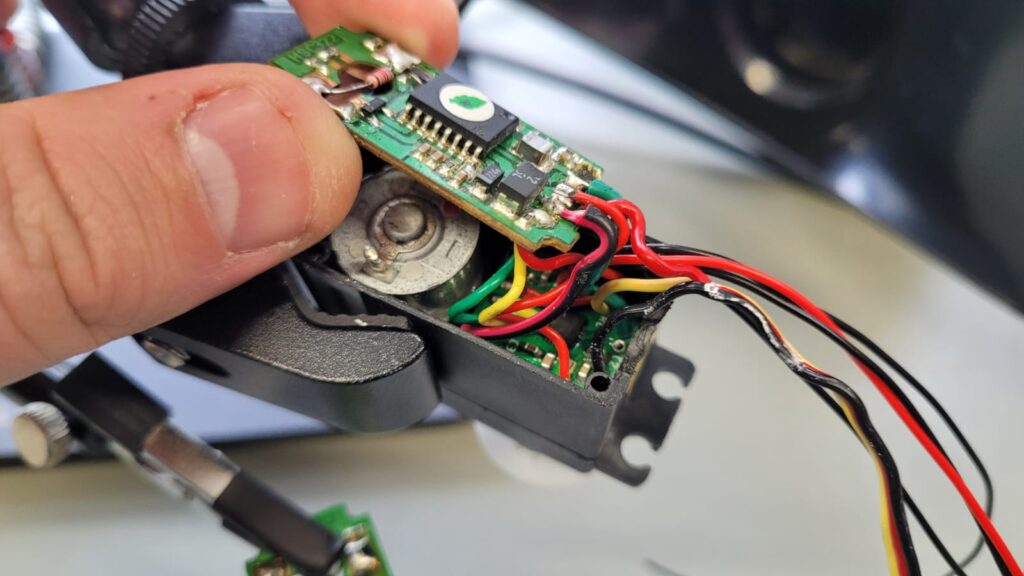
Bereits beim Aufstehen lernen war das Problem, dass die KI nie eine Rückmeldung darüber bekommen hat, ob eine Bewegung der Beine überhaupt ausgeführt werden konnte. Aufgrund des hohen Gewichts schafft es der Hexapod oft nicht, die Bewegungen tatsächlich auszuführen. Somit hat die KI auf Basis von falschen Rückmeldungen gelernt und das Ergebnis war oft nicht gut.
Als Lösung modifizierten wir die Servos in den Beinen des Hexapods so, dass eine Rückmeldung zur KI möglich ist.
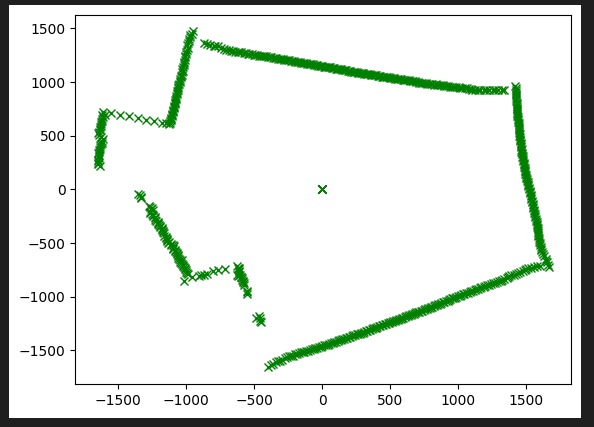
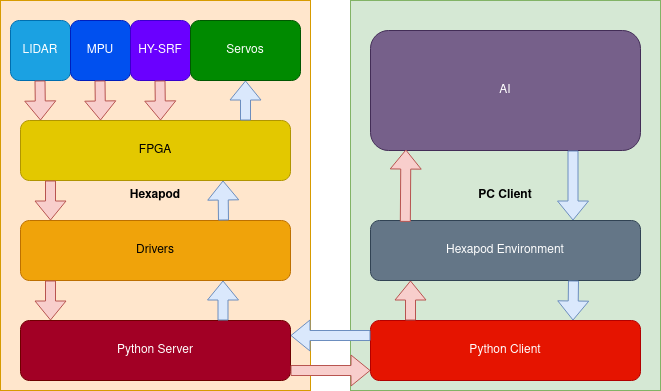
Lidar
Für den Lidar-Sensor gab es bereits einen verifizierten IP-Block, der mit dem Sensor kommuniziert. Dieser musste erst in das bestehende System eingebunden werden. Neben der Entwicklung des Treibers mussten die Abstandsdaten auch aufbereitet und der KI zur Verfügung gestellt werden.
Embedded Linux
Vom ersten Jahr existierte bereits eine Linux-Distribution auf Basis von Yocto auf dem Prototypen. Für eine neue SD-Karte konnte allerdings kein Image davon erstellt werden, da das Script zum Erstellen nicht mehr funktioniert hat. Außerdem waren die Kernel-Treiber und der python-Server nicht im Image dabei, sondern mussten händisch darauf kopiert und geladen oder gestartet werden. Deshalb haben wir eine neue Linux-Distribution mit diesen Erweiterungen erstellt.
Reinforcement Learning
Die künstliche Intelligenz wurde von der vorigen Projektgruppe für das Aufstehen lernen entwickelt. Diese wurde so erweitert, dass der Hexapod auch Distanzen erkennen und Bewegungsmuster ausführen kann.